Loco-Manipulation for Quadruped Robot: Deploying RL Policies on Unitree Go2
This project develops and deploys a reinforcement-learning control stack for unified locomotion and manipulation (“loco-manipulation”) on a Unitree Go2 quadruped with arm. Traditional pipelines split gait and arm control; this work targets full-body, learned control for agile mobility and interaction.
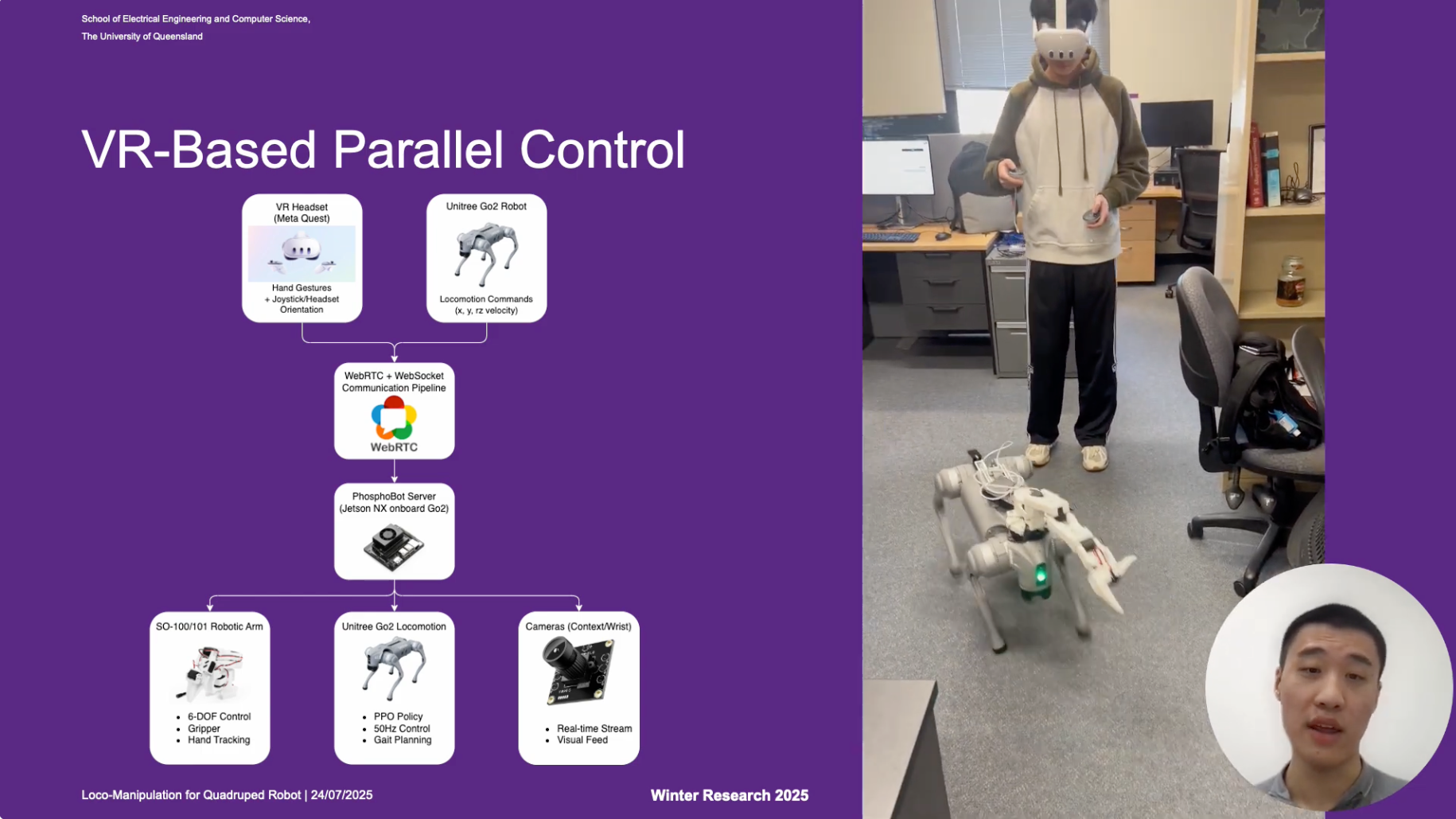
PPO policies are adapted with Unitree SDK2 and executed on Jetson Orin. A VR/WebRTC layer supplies high-level operator intent alongside autonomous behaviours. The controller uses a hybrid architecture that combines a learned policy with safety guards, synchronises arm and leg motion, and fuses proprioceptive observations with vision. Performance is benchmarked across terrains and manipulation tasks, and Sim2Real strategies such as latency modelling and domain randomisation narrow the gap between simulation and hardware. The system demonstrates real-time VR parallel control with end to end deployment from policy execution to hardware actuation.